SensoDrive Explanation
The SensoDrive is a powerful/professional actuated steering wheel for simulation purposes, it communicates over CAN bus and can be used with JOAN. This section of the documentation mainly explains how to set and get parameters from the wheel and what has been done in JOAN to make it work.
Note
Please be careful if you are going to work with the SensoDrive, it can deliver up to 20Nm of torque, which is quite a lot if you are testing with it ALWAYS KEEP YOUR THUMBS OUT OF THE WHEEL!
Hardware
The SensoDrive's hardware mainly consists of three necessary parts.
SensoWheelThis is the biggest part, where the BLDC motor is attached to the frameSteering wheelThis part is self-explanatory, it can be removed and switched for other wheelsPCAN USB DongleThis is the bridge between the internal controller of the SensoDrive and your PC
Setting up your PC for a SensoDrive
Before you can plug and play the SensoDrive with JOAN (on a new PC, all PCs that we use at the university are already prepared) you need to get:
- The drivers for the PEAK systems PCAN USB. You can find them here: link
- The DLLs (Dynamic Linker Libraries) for PCAN-Basic-API. These can also be found here: link
Note
Make sure you copy the appropriate DLLs to your windows system folders. So for the 32-bit version put it in System32 for the 64-bit version put it in Syswow64.
Now you should be all set to use the PCAN-Basic API with the SensoDrive.
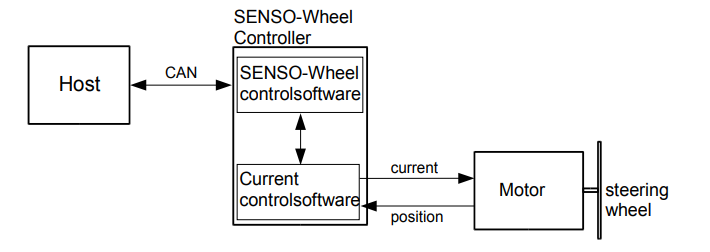
System overview
The total system is shown in a simplified version below. The main thing we will focus on furthermore in this documentation is the 'CAN' piece. This contains all the information we can send and receive from the SensoWheel system.
Software Explanation
This section will describe how the current communication with the SensoDrive with PCAN is done. If you really want to know all about CAN communication protocols and how the PCAN API works please read the extensive documentation provided by PEAK Systems. (Same link as the drivers)
The main document of reference for this section is the 'Software manual Version 3.10.0 SENSO-wheel' by the SensoDrive company itself. LINK This explains all relevant info regarding the messages you can send and receive and what the messages should look like that you send. For the rest of this section, we will explain the different steps to communicate over PCAN in python.
Before giving an example we first need to know what a CAN (Controller Area Network) message is and a short introduction to the PCAN-BASIC API.
CAN Messages
In this case, the CAN message is just a collection of bytes we send to the SensoDrive.

As can be seen from the image the CAN Message typically contains:
Identifier (CAN-ID)DLCThis is a 'Data Length Code' and contains info as to how many bytes are in the message.DataThese are 0 to 8 bytes of data.
Now a bit more on the 'Data' part, as with many applications the data that can be set in bytes is often done by using hexadecimal numbers (as is evident by the 0h's shown in the picture). It is therefore recommended to at least have some understanding of how this works. However because we are using python it is (luckily) also very easy to just convert your integers into bytes that you can send.
PCAN BASIC API
The PCAN Basic API is a C library for Python, there is a 'wrapper' that makes this C library available to us. There are however a couple of things that you have to keep in mind when working with this library, they are listed here:
Be aware that you are not directly sending CAN messages to the SensoDrive but first to the PCAN Basic Dongle
This is a very important concept to understand because the SensoDrive itself is capable (and does) of sending info about its current state. The state can be error for example. However, the PCAN Basic library has the same functionality. So DO NOT CONFUSE THESE FOR EACHOTHER. The status of the SensoDrive is only included in the actual data it sends back. However, the status of the PCAN Basic library is only the dongle. So for example if you yank out the USB cable the PCAN Basic
API can return an error, this is not the SensoWheel itself (obviously)
-
Make sure you initialize the Dongle with the appropriate USB channel and BAUDRATE -
Make sure you read all the messages you send, else a buffer will fill up and you introduce lag
Actual Code
If you are insisting on getting how the SensoDrive works within JOAN, we'd like to refer you to the specific file
joan/modules/hardwaremanager/hardwaremanager_inputs/joansensodrive.py
Within this file, the most important class is the SensoDriveComm (which is a multi-process) class. Here all the above-mentioned tips and tricks are used.
So please dig your teeth in there!